

19. Go, go, go!
Nun ist es so weit, Captain:
Der Saal wurde gemietet, ein Orchester engagiert.
Und jetzt wollen wir sehen, ob Sie tanzen können.
Q
Das Apollo-Programm erlebte mit der Entscheidung für die Lunar-Orbit-Methode, dem „dritten Weg“, eine zusätzliche Beschleunigung. Das Verfahren verminderte nämlich nicht nur den Energieverbrauch auf dem Weg zum Mond, sondern sorgte auch dafür, dass sich die Hardware-Entwicklung (Rakete, Raumschiff, Mondlander) klarer strukturierte, indem es die nötigen Schnittstellen zwischen den Entwicklungsabteilungen reduzierte. Entwicklung und Bau des Raumschiffs (CSM: Apollo-Kapsel samt Service-Einheit) oblag der North American Aviation, einer Flugzeugfirma in Downey, Kalifornien; mit dem Mondlander, Lunar Module (LM) genannt, wurde wenige Wochen nach der Entscheidung für die Lunar-Orbit-Methode die Grumman Aircraft Engineering Corporation in New York City beauftragt.
Die CSM-Entwickler (North American) mussten sich nur um zwei klare Schnittstellen kümmern – die zwischen CSM und Saturn V und die zwischen CSM und Lunar Module. Die Entwickler des LM (Grumman) nur um die zwischen CSM und LM. North American brauchte sich nicht mit Aspekten der Mondlandung zu befassen (das CSM landete ja nicht auf dem Mond), Grumman nicht mit Belangen des Wiedereintritts in die Erdatmosphäre (was Aufgabe des CSM war). Für die Raketenbauer in Huntsville gab es ebenfalls zwei klar definierte Schnittstellen, nämlich die zwischen CSM und Saturn V und die zwischen Rakete und LM, deren Details zudem erst später ausgearbeitet werden mussten.
Nach dieser grundlegenden Entscheidung über den richtigen Weg zum Mond, galten die folgenden Jahre der Ausarbeitung der Details, und die hatten es in sich, nicht nur wegen der Komplexität der Angelegenheit, sondern auch deshalb, weil wegen der Kürze der Zeit alles gleichzeitig stattzufinden hatte: Als würde man bei einem Auto in voller Fahrt auf dem Highway ständig an der Struktur, dem Antrieb, den Bremsen, der Lenkung, den Sicherheitssystemen und so weiter herumschrauben, bis man, hoffentlich kurz vor dem Ende der Fahrbahn, beim endgültigen Design angekommen ist.
So hatte man beispielsweise keinerlei Vorstellung davon, wie die Mondoberfläche, auf der man landen wollte, wirklich beschaffen ist. Bestand sie, so die eine Theorie, aus hartem Untergrund mit vielen darauf herumliegenden Felsbrocken unterschiedlichster Größe? Oder, die alternative Theorie, aus meterhohem, feinem Staub, in dem man beim Aufsetzen zu versinken drohte?
Um diese Frage zu klären, wurden zwei unbemannte Programme gestartet: Die Ranger-Sonden sollten hart auf dem Mond aufschlagen und bis dahin Fotos von der Oberfläche liefern. Die Sonden der Surveyor-Reihe waren ausgelegt für eine weiche Landung und sollten danach über Tage und Wochen Daten (einschließlich Bilder) ihrer Umgebung zur Erde übermitteln. Das Ranger-Programm produzierte – von 1961 bis Anfang 1964 – sechs Mal hintereinander Fehlschläge: Die Geräte verglühten noch in der Erdatmosphäre, verfehlten den Mond, konnten keinen Funkkontakt zur Erde herstellen. Erst mit Ranger 7, gestartet am 28. Juli 1964, wurden bis zum Aufschlag, der drei Tage später erfolgte, über 4.000 Bilder übermittelt; die beiden letzten Ranger-Missionen sandten zusammen noch einmal rund 13.000 Bilder zur Erde.
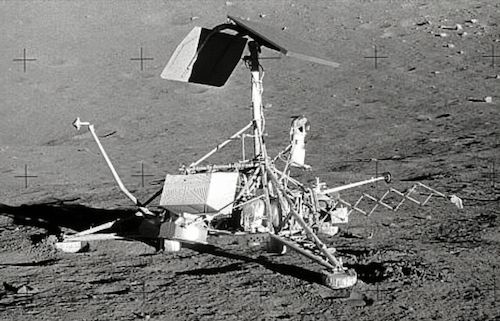
Surveyor 1 landete als erste amerikanische Sonde am 2. Juli 1966 weich auf dem Mond und übermittelte aus dem Oceanum Procellarum über 11.000 Bilder. Sechs weitere Missionen, von denen zwei schief gingen, folgten. Insgesamt wurden dabei etwa 60.000 Bilder von vier verschiedenen Mondgebieten übertragen sowie zwei Bohrungen in den Mondboden unternommen. Auf den Bildern waren die unterschiedlichsten Bodenformationen zu sehen: glatter Fels, Geröll- und Staubflächen, einzelne Felsbrocken und Ebenen übersät mit zahlreichen kleinen Kratern. Nirgends jedoch waren die befürchteten meterhohen Staubschichten abgebildet. Wenn Staubebenen zu sehen waren, dann lagen meist zahlreiche Felsbrocken darin verstreut, was bedeutete, dass die Staubschicht entweder nicht sehr tief oder tragfähig genug war, um diese nicht versinken zu lassen.
Aber Mitte 1964, als die ersten Bilder gewonnen wurden, befand sich die Entwicklung des Lunar Moduls bereits in einem fortgeschrittenen Stadium. Man hatte einfach nicht genug Zeit, um die Daten der Ranger- und Surveyor-Sonden abzuwarten, sie sauber auszuwerten und dann die Konstruktion des LM daraufhin auszurichten. Die NASA hatte also gar keine Wahl, als bei den Vorgaben für das LM alle Eventualitäten zu berücksichtigen. So wurde im Laufe des Jahres 1963 der geforderte Durchmesser der vier Landeteller von zunächst 22 Zentimeter auf 91 Zentimeter erhöht, um die Gefahr des Einsinkens im Mondstaub zu reduzieren. Damit passten sie aber nicht mehr in den Nutzlastadapter der Rakete und Grumman musste zusätzlich einen Faltmechanismus für die neuen Landeteller konstruieren.

Knapp zweieinhalb Jahre, von Ende 1962 bis Frühjahr 1965, wurde so, in enger Zusammenarbeit mit den Astronauten, die das LM fliegen sollten, Schritt für Schritt, System für System ein Fahrzeug entwickelt, dessen einziger Zweck in der Landung auf einem anderen Himmelskörper bestand. Heraus kam am Ende ein Gerät, dessen Form vollständig seiner Funktion folgte. Von den Astronauten wurde es wegen seines wenig ansprechenden Aussehens Bug (Wanze) oder Spider (Spinne) genannt. Es besteht aus zwei Stufen: der unteren Landestufe, die im Wesentlichen aus den ausladenden Landebeinen, dem Abstiegstriebwerk sowie aus Treibstofftanks besteht, und der oberen Aufstiegsstufe mit der Astronautenkabine, dem Aufstiegstriebwerk und dessen Tanks.
*
Für das Unternehmen Mondlandung ist neben der Rendezvous-Technik auch die Beherrschung der EVA unabdingbar. EVA steht für extra-vehicular Activity, das heißt für ein Außenbordmanöver, also für astronautische Tätigkeiten außerhalb der Raumschiffe, sei es ein Weltraumspaziergang im freien Raum oder Arbeiten auf der Mondoberfläche. Sind beziehungsweise inwieweit sind Astronauten in der Lage, außerhalb eines Raumschiffs autonom zu agieren? Um diese Probleme – EVAs und Rendezvous-Technik, die man theoretisch, von Doktorarbeiten bis hin zu Ausschüssen, bereits seit Jahren bearbeitete – auch in praxi, das heißt im Weltraum, anzugehen, hatte die NASA mittlerweile das Programm Gemini aufgelegt. Mit der Leitung wurde, wie schon bei Mercury, das Manned Spacecraft Center in Houston unter Robert Gilruth betraut. Als Booster für die zwölf geplanten Missionen des Programms hatte sich Gilruth, nicht zur Freude Huntsvilles, für die Titan-Rakete entschieden, eine ursprünglich als Waffenträger entwickelte, dann für bemannte Raumfahrtaktivitäten modifizierte Rakete.
Die Kosten für Gemini, die ja zusätzlich zum Apollo-Programm anfielen, wurden mit einer halben Milliarde Dollar veranschlagt, begannen aber bereits in der Planungsphase, noch lange vor dem ersten Start einer Mission, aus dem Ruder zu laufen. Zum Beispiel, weil die NASA nach Alternativen suchte für die aufwändigen und teuren Wasserungen der Mercury-Missionen. Jedes Mal musste die Navy, wenn eine Kapsel im Atlantik oder Pazifik niederging, im voraussichtlichen Landegebiet mit zahlreichen Schiffen präsent sein (Besatzungsstärke 10.000 Mann und darüber), um die Kapsel zu bergen. Um das zu vermeiden, wurde das Gemini-Programm ursprünglich so projektiert, dass die Gemini-Kapseln wie ein Segelflugzeug auf festem Untergrund niedergehen konnten.
Zuwege bringen sollte das ein System namens Parawing, das der Ingenieur Francis Rogallo bereits Ende der 1940er Jahre für das Forschungslabor der NACA in Langley, Virginia, zu entwickeln begonnen hatte. Das Funktionsprinzip des Parawings – im entfalteten Zustand ein riesiges Gebilde, etwa drei Mal so groß wie die Gemini-Kapsel, das aussieht wie ein mechanischer Schmetterling – ist recht einfach: Während der Mission befindet er sich zusammengefaltet in der Kapselhülle; wenn die Kapsel beim Reentry mit dem stumpfen Ende, also dem Hitzeschild voran, durch die oberen Atmosphäreschichten rast, wird der Parawing entfaltet, richtet die Kapsel dabei in die Waagerechte aus, sodass der Pilot das Gefährt aus Kapsel plus Parawing über die Streben, mit denen er mit der Kapsel verbunden ist, ähnlich wie ein Flugzeug steuern und auf der Landepiste aufsetzen kann.
Aber in der Praxis zeigte das so einfach anmutende Prinzip seine Tücken: Bereits bei den ersten Tests, die nur zeigen sollten, dass sich ein Parawing mit einer daran gehängten Kapsel steuern ließ – wozu ein bereits entfalteter Parawing, an dem eine Dummy-Kapsel hing, per Hubschrauber in eine ausreichende Höhe geschleppt und dann ausgeklinkt wurde –, produzierte North American, das die Weiterentwicklung des Parawings übernommen hatte, hauptsächlich Bruchlandungen. Zahlreiche Boilerplates wurden beschädigt oder zerstört, weil der Parawing sich zu früh, zu spät oder gar nicht öffnete oder weil er nach der Öffnung instabil wurde. Zwei Jahre lang mühte sich North American ab, bekam die Probleme aber nicht in den Griff, bis im Februar 1964 die NASA schließlich die Reißleine zog: Das Projekt Parawing wurde ad acta gelegt. Bis zu diesem Zeitpunkt hatte man nicht nur zwei Jahre Forschungsarbeit investiert, sondern auch 25 Millionen Dollar.
Zeitgleich und – so jedenfalls schien es bis Ende 1966 – wesentlich erfolgreicher entwickelte North American das CSM, das, wie das LM, aus zwei Teilen besteht: dem konusförmigen Command Module (CM) und dem zylinderförmigen Service Module (SM). Das CM ist die Apollo-Kapsel, also das eigentliche Raumschiff. In ihm halten sich die Astronauten während des Hin- und Rückflugs auf; nur das knapp sechs Tonnen schwere CM ist für den Wiedereintritt in die Erdatmosphäre ausgelegt. Nur diese sechs Tonnen kehren von den knapp 3.000 Tonnen, die die Rakete beim Start wiegt, wieder von der Mondreise zurück. Überleben können die Astronauten im CM allerdings nur wenige Minuten, da es vor allem für den Wiedereintritt (Hitzeschild) optimiert ist. Die Versorgung mit Atemluft, die Bereitstellung der Energie, der Antriebsteil (Triebwerk plus Tanks), der die Manövrierfähigkeit ermöglicht, sowie diverse Antennen für Funkverkehr und Fernsehübertragungen sind vollständig ausgelagert ins Service Module, das während der gesamten Mission an das Command Module gekoppelt bleibt. Erst kurz vor dem Reentry wird es abgesprengt.

Auch bei der Entwicklung des CSM, vor allem des CM, waren die Astronauten von Anfang an eingebunden. Sie begleiteten die Produktion der Kapseln bei North American, führten immer wieder Tests durch und optimierten so das Interieur der Kapsel – von der Anordnung der Instrumente an den Panels bis hin zur Form der Sitze. Während diese Entwicklungsarbeit zu einer stetigen Verbesserung führte, häuften sich bald Änderungswünsche aus diversen Abteilungen der NASA, die zur Folge hatten, dass bereits funktionierende Systeme immer wieder neu aufgesetzt wurden, weil jemand der Meinung war, dass das eine oder andere vielleicht noch besser funktionieren könnte, wenn man daran diese oder jene Kleinigkeit änderte. Als sich North American und Grumman, die beim LM das gleiche Problem hatten, darüber beschwerten, entschied die NASA Anfang 1965, fortan nur noch Änderungswünsche zu akzeptieren, die „echte Fehler abstellten. Reine Produktverbesserungen wurden nicht mehr akzeptiert“. Unabdingbare Veränderungen waren solche, die sich aus den parallel laufenden Teststarts ergaben, etwa aus den SA-, A- oder PAT-Missionen oder auch aus den bemannten Gemini-Missionen, die 1965 begannen.